
Ref: EWTIDMCS-615
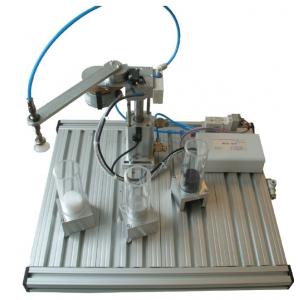
MCS-615 LAG Partie opérative: Magasin de stockage avec trois cylindres verticaux
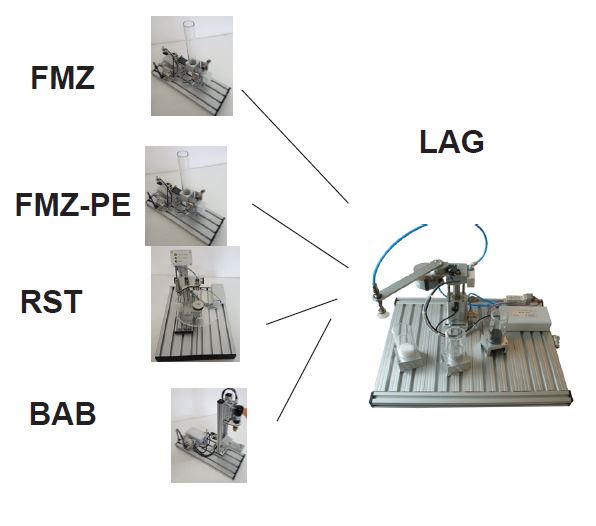
Association possible en amont: FMZ, FMZ-PE, RST
Un moteur à entraînement électrique est soulevé par un vérin à course courte.
Avec une pince aspirante, les pièces à usiner sont saisies à la première position par un autre module et convoyées en cercle.
Peu importe la position (tous les 10 °), ces pièces peuvent être stockées.
Le positionnement à 10 ° est signalé par une barrière lumineuse à fourche.
Les positions doivent être réalisées via un programme automate.
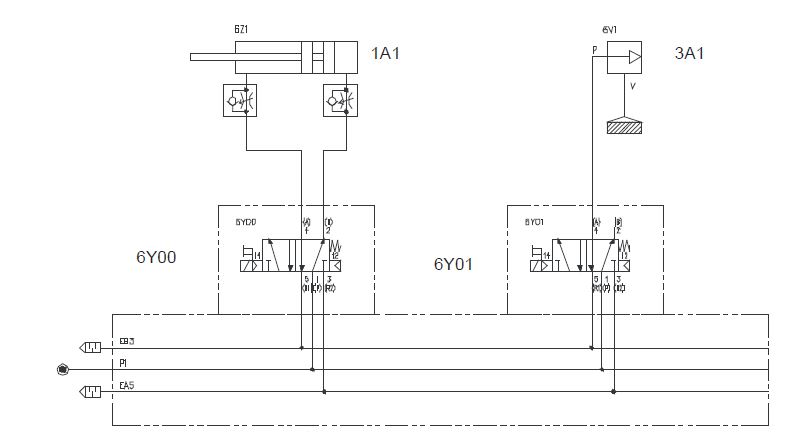
La position finale supérieure du vérin est mesurée avec un capteur magnétique.
Le cylindre est commandé par un distributeur électromagnétique à 5/2 voies.
Le moteur possède un embrayage à glissement limité. Cela évite les dommages dus à une programmation incorrecte.
Caractéristiques techniques:
Alimentation: 24 V CC
Pneumatique: 5...6 bars non lubrifié
Capteurs: 1 Capteur de vérin
2 Microcontacteurs
1 barrière lumineuse
Actuateurs 1 Commande moteur
2 distributeur 5/2 monstable
1 vérin
1 Pince sous vide
Entrée sorties API nécessaires
3 Entrées numérique
4 Sorties numérique
Raccordement 25 pôles D-SUB
Echantillons nécessaires
Cylindre 30x20mm
Dimensions 360x400x225 mm
Poids 5.0 kg
Livré avec câble D-SUB-25
A combiner avec les stations MCS:
Amont: FMZ, FMZ-PE, RST
Aval:
Avec une pince aspirante, les pièces à usiner sont saisies à la première position par un autre module et convoyées en cercle.
Peu importe la position (tous les 10 °), ces pièces peuvent être stockées.
Le positionnement à 10 ° est signalé par une barrière lumineuse à fourche.
Les positions doivent être réalisées via un programme automate.
La position finale supérieure du vérin est mesurée avec un capteur magnétique.
Le cylindre est commandé par un distributeur électromagnétique à 5/2 voies.
Le moteur possède un embrayage à glissement limité. Cela évite les dommages dus à une programmation incorrecte.
Caractéristiques techniques:
Alimentation: 24 V CC
Pneumatique: 5...6 bars non lubrifié
Capteurs: 1 Capteur de vérin
2 Microcontacteurs
1 barrière lumineuse
Actuateurs 1 Commande moteur
2 distributeur 5/2 monstable
1 vérin
1 Pince sous vide
Entrée sorties API nécessaires
3 Entrées numérique
4 Sorties numérique
Raccordement 25 pôles D-SUB
Echantillons nécessaires
Cylindre 30x20mm
Dimensions 360x400x225 mm
Poids 5.0 kg
Livré avec câble D-SUB-25
A combiner avec les stations MCS:
Amont: FMZ, FMZ-PE, RST
Aval:
Poids: 5 Kg










Gamme MCS partie opérative en automatisme