Ref: EWTGURT060
RT 060 Système de TP en régulation de position, HSI (Réf. 080.06000)
Ensemble complet : Appareil d'essai + Logiciel + Documentation pédagogique + Câble USB
Le RT 060 propose des essais de base sur un système réglé de position.
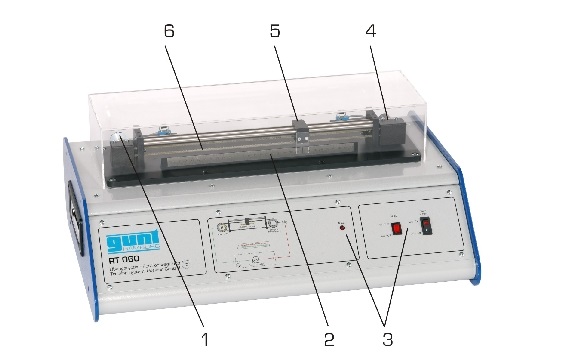
Le système réglé est un chariot qui est déplacé à laide dune courroie crantée.
La position représente la grandeur réglée.
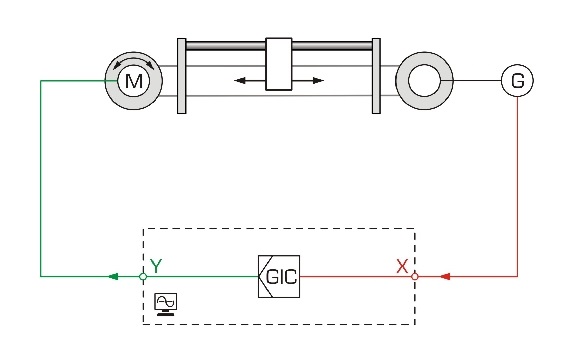
La position du chariot est saisie par un élément de mesure, qui est ici un codeur rotatif.
Le signal de sortie du capteur est transmis au régulateur logiciel.
Le signal de sortie du régulateur pilote lactionneur, qui est ici le moteur.
Le chariot est ainsi tiré dans une nouvelle position sur la courroie crantée.
Le moteur est automatiquement arrêté lorsque le chariot atteint une des deux positions de fin de course.
La position actuelle peut être lue à tout moment directement sur une règle graduée en acier.
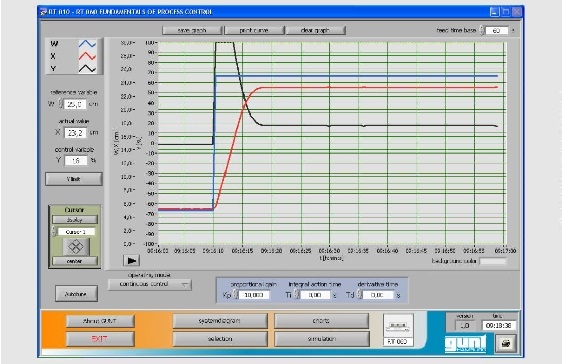
Le comportement de régulation est affiché directement sous la forme dintervalles de temps.
Un capot de protection transparent permet dobserver sans risque les essais.
Reposant sur une intégration matériel/logiciel (HSI), le logiciel GUNT puissant est un élément central de la série dappareils.
La connexion entre lappareil dessai et le PC est assurée par une interface USB (PC externe requis).
Leffet de modifications sur le comportement du système peut être étudié rapidement et facilement à laide du logiciel.
Un programmateur intégré permet de définir des grandeurs de référence et des intervalles de temps pour réaliser des courbes de grandeurs de référence.
Dautres questions relatives à la technique de régulation peuvent être traitées à laide de simulations logicielles pour des systèmes réglés jusquau second ordre.
Le fait de combiner un système réglé réel très parlant et des simulations dautres systèmes réglés, dans la série dappareils RT 010 RT 060, facilite la compréhension.
La préparation des essais ainsi que les simulations logicielles peuvent être effectuées dans le cadre de lapprentissage à distance.
Lobservation des essais est possible sur le réseau local, sur un nombre illimité de postes de travail.
Le système réglé est un chariot qui est déplacé à laide dune courroie crantée.
La position représente la grandeur réglée.
La position du chariot est saisie par un élément de mesure, qui est ici un codeur rotatif.
Le signal de sortie du capteur est transmis au régulateur logiciel.
Le signal de sortie du régulateur pilote lactionneur, qui est ici le moteur.
Le chariot est ainsi tiré dans une nouvelle position sur la courroie crantée.
Le moteur est automatiquement arrêté lorsque le chariot atteint une des deux positions de fin de course.
La position actuelle peut être lue à tout moment directement sur une règle graduée en acier.
Le comportement de régulation est affiché directement sous la forme dintervalles de temps.
Un capot de protection transparent permet dobserver sans risque les essais.
Reposant sur une intégration matériel/logiciel (HSI), le logiciel GUNT puissant est un élément central de la série dappareils.
La connexion entre lappareil dessai et le PC est assurée par une interface USB (PC externe requis).
Leffet de modifications sur le comportement du système peut être étudié rapidement et facilement à laide du logiciel.
Un programmateur intégré permet de définir des grandeurs de référence et des intervalles de temps pour réaliser des courbes de grandeurs de référence.
Dautres questions relatives à la technique de régulation peuvent être traitées à laide de simulations logicielles pour des systèmes réglés jusquau second ordre.
Le fait de combiner un système réglé réel très parlant et des simulations dautres systèmes réglés, dans la série dappareils RT 010 RT 060, facilite la compréhension.
La préparation des essais ainsi que les simulations logicielles peuvent être effectuées dans le cadre de lapprentissage à distance.
Lobservation des essais est possible sur le réseau local, sur un nombre illimité de postes de travail.
Contenu didactique / Essais
- illustration des fondements de la technique de régulation par le biais dun système réglé de niveau
- circuit de régulation ouvert
- système réglé sans compensation
- effets de différents types de régulateurs sur le comportement de le circuit de régulation fermé
- optimisation du régulateur par le biais dune modification des paramètres de régulateur: Kp, Tn, Tv
- enregistrement des réponses à un échelon en cas de: échelon de grandeur réglante et de référence
- limitation de la grandeur réglante et effet sur la régulation
- simulation logicielle de différents systèmes réglés (P, I, PT1, PT2)
- comparaison de différents paramètres de système réglé
- logiciel GUNT spécifique pour toute la série dappareils
- régulateur: manuel non réglé, continu, deux ou trois points
- programmateur pour courbes de grandeurs de référence propres
- enregistrement dintervalles de temps
- apprentissage à distance: simulation logicielle sur un nombre de postes de travail illimité
Les grandes lignes
- illustration des relations fondamentales de la technique de régulation par le biais: système réglé de position
- régulateur logiciel configurable et paramétrable avec des fonctions étendues
- préparation des essais et simulation logicielle pour lapprentissage à distance
-suivi et évaluation des essais possibles sur le réseau local
- illustration des fondements de la technique de régulation par le biais dun système réglé de niveau
- circuit de régulation ouvert
- système réglé sans compensation
- effets de différents types de régulateurs sur le comportement de le circuit de régulation fermé
- optimisation du régulateur par le biais dune modification des paramètres de régulateur: Kp, Tn, Tv
- enregistrement des réponses à un échelon en cas de: échelon de grandeur réglante et de référence
- limitation de la grandeur réglante et effet sur la régulation
- simulation logicielle de différents systèmes réglés (P, I, PT1, PT2)
- comparaison de différents paramètres de système réglé
- logiciel GUNT spécifique pour toute la série dappareils
- régulateur: manuel non réglé, continu, deux ou trois points
- programmateur pour courbes de grandeurs de référence propres
- enregistrement dintervalles de temps
- apprentissage à distance: simulation logicielle sur un nombre de postes de travail illimité
Les grandes lignes
- illustration des relations fondamentales de la technique de régulation par le biais: système réglé de position
- régulateur logiciel configurable et paramétrable avec des fonctions étendues
- préparation des essais et simulation logicielle pour lapprentissage à distance
-suivi et évaluation des essais possibles sur le réseau local
Caractéristiques techniques
Moteur
- tension de service: 12VDC
- rapport de transmission: i=50
- vitesse de rotation: 85min-1
- couple: 200Nmm
Codeur rotatif: potentiomètre multi-tours
Vitesse de déplacement max.: 45mm/s
Règle graduée en acier: 0…300mm
Régulateur logiciel configurable et paramétrable comme régulateur P, PI, PID et régulateur tout ou rien
Plages de mesure
- déplacement: max. 300mm
230V, 50Hz, 1 phase
Moteur
- tension de service: 12VDC
- rapport de transmission: i=50
- vitesse de rotation: 85min-1
- couple: 200Nmm
Codeur rotatif: potentiomètre multi-tours
Vitesse de déplacement max.: 45mm/s
Règle graduée en acier: 0…300mm
Régulateur logiciel configurable et paramétrable comme régulateur P, PI, PID et régulateur tout ou rien
Plages de mesure
- déplacement: max. 300mm
230V, 50Hz, 1 phase
Informations logistiques
Dimensions et poids
Lxlxh: 600x450x280mm
Poids: env. 20kg
Lxlxh: 600x450x280mm
Poids: env. 20kg
Techniques > Maintenance - Productique > Régulation > Bases de la régulation - Systèmes industriels
Techniques > Génie des Procédés > Principes de base du génie des procédés > Bases de la régulation
Techniques > Régulation > Bases de la régulation > Régulation de position
Formations > CPGE > Regulation - Asservissement
Poids: 20 Kg Delai de livraison estimé : 5 semaines