Ref: EWTAMBB50
BB50 Système à bascule asservissement de position de billes de différentes natures sur bascule 1m
mesure position avec caméra, Documentation en GB, partie opérative seule, nécessite carte et logici
- Régulation de la position de billes de nature différentes sur un rail mobile.
- Utilisation et démonstration des avantages de la logique floue
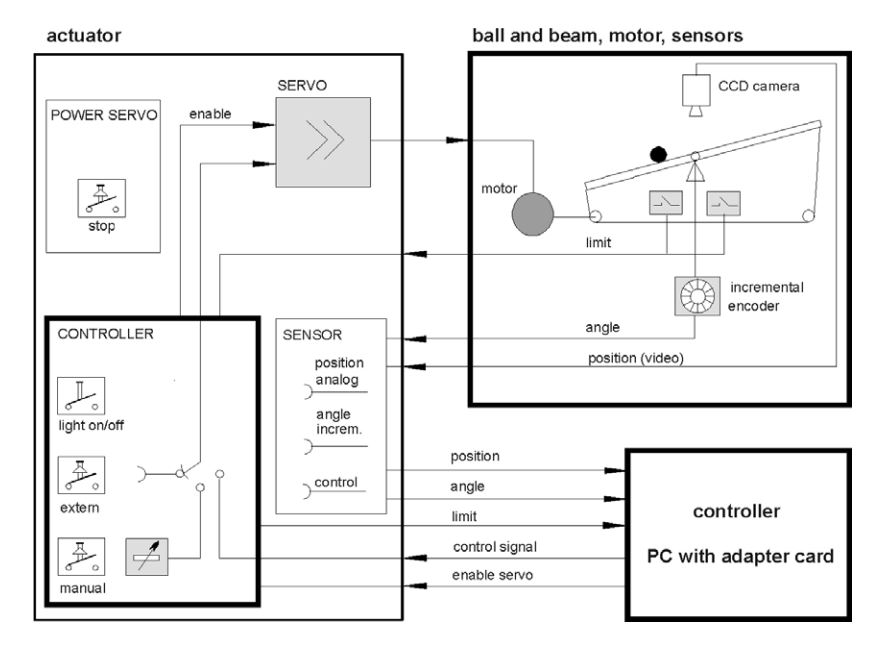
Grâce à une courroie crantée, une roue dentée et un embrayage monté sur l'arbre d'un moteur à courant continu, le rail peut être entraîné de telle sorte que la boule soit stabilisée dans une position prédéfinie.
La stabilisation de la balle est réalisée par un contrôleur numérique.
Sur la base de mesures, le contrôleur génère un signal approprié, qui commande le moteur à courant continu par un servo-amplificateur électronique.
Les mesures sont l'angle du rail obtenu par 2 codeurs incrémentaux et la position de la balle obtenue par une caméra CCD.
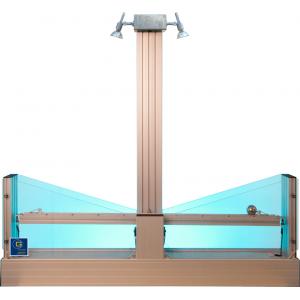
Toutes les pièces mobiles sont recouvertes de plexiglass transparent.
Eclairage par deux lampes fixées le support de la caméra.
Système monté sur un cadre aluminium profilé avec faces avant et arrière protégées par un plexiglass transparent.
Connexions électriques via un connecteur multi-broches.
Note : régulateur non inclus
Caractéristiques Techniques:
Longueur du rail 1m
Dimensions (Lxlxh) : 1105x215x1025mm
Poids : 18 kg
Entrées:
- tension de linduit (24 V, nom. 2 A, couple nominal 9,6 Ncm)
- alimentation de léclairage : + 24 V
- alimentation pour interrupteur de fin de course : + 15 V
- alimentation du capteur incrémental : + 5 V
Sorties:
- 2 fins de courses (max. angle droit/gauche)
- angle TTL (capteur incrémental: 0.018°/incr)
- position (signal vidéo par camera CCD)
Boitier de commande
Boitier 19" (Lxlxh : 471 x 340 x 152 mm, poids 11 kg) contenant un servo-amplificateur, deux alimentations de courant, un module capteur et un module de contrôle.
Alimentation du boitier : 220 V, 50 Hz, 140 W
Servo-amplificateur piloté par PC via un signal analogique.
Alimentations fournissant les courants nécessaires aux différents modules.
Sur la face avant du boitier les affichages correspondants indiquent les tensions disponibles, le statut du système (connexion au contrôleur, système prêt pour expérience), le mode du contrôleur (manuel, PC, externe). Lun des indicateurs possède une clé pour arrêter lensemble des contrôleurs.
Le module capteur fournit un signal analogique -10 ... +10 V et binaire (12 bit parallèle) en fonction du signal vidéo.
les sorties BNC indiquent les mesures de position de la balle, langle du faisceau et le signal du contrôle.
Le module contrôle fournit le signal de commande et darrêt du servo-amplificateur. La zone daffichage intègre deux clés (démarrage manuel ou contrôle extérieur), un potentiomètre (contrôle manuel du signal), un signal dentrée (contrôle extérieur du servo-amplificateur) et un interrupteur pour léclairage.
Disponible sur facade avant:
Entrées
- Commande Manuel du servo moteur via potentiomètre
- Entrée BNC pour signal de commande : -10 ... +10 V
Sorties BNC :
- position de la balle: -10 V ... +10 V
- angle du rail canal A (TTL)
- angle du rail canal B (TTL)
- signal de commande Servo moteur: -10 ... +10 V
Disponible sur facade Arrière :
- Connectique pour controle
Caractéristique Minimal de la carte PC:
- 4 entrées TOR dédiées Comptage incrémental
- 4 Entrées TOR (registre d'état ou 4/12 bits de la position de la balle)
- 1 entrée CAN : analogique 12 bits
ou
- 8 entrées TOR pour lecture de la position avec les 4 autres entrées TOR
- 4 Sorties TOR : sélection registre et sécurité (sortie rapide pulse 10µs)
- 1 sortie DAC : Numérique -10 ... +10 V
Version standard :
BB50 livré avec un boitier de commande 19'' intégrant le servo-amplificateur pour le moteur CC, l'unité d'adaptaion du signal ainsi que les alimentations.
Version PC (en option):
Option BB50-06 : Ecran pour visualiser les images en provenance de la caméra
- Utilisation et démonstration des avantages de la logique floue
Grâce à une courroie crantée, une roue dentée et un embrayage monté sur l'arbre d'un moteur à courant continu, le rail peut être entraîné de telle sorte que la boule soit stabilisée dans une position prédéfinie.
La stabilisation de la balle est réalisée par un contrôleur numérique.
Sur la base de mesures, le contrôleur génère un signal approprié, qui commande le moteur à courant continu par un servo-amplificateur électronique.
Les mesures sont l'angle du rail obtenu par 2 codeurs incrémentaux et la position de la balle obtenue par une caméra CCD.
Toutes les pièces mobiles sont recouvertes de plexiglass transparent.
Eclairage par deux lampes fixées le support de la caméra.
Système monté sur un cadre aluminium profilé avec faces avant et arrière protégées par un plexiglass transparent.
Connexions électriques via un connecteur multi-broches.
Note : régulateur non inclus
Caractéristiques Techniques:
Longueur du rail 1m
Dimensions (Lxlxh) : 1105x215x1025mm
Poids : 18 kg
Entrées:
- tension de linduit (24 V, nom. 2 A, couple nominal 9,6 Ncm)
- alimentation de léclairage : + 24 V
- alimentation pour interrupteur de fin de course : + 15 V
- alimentation du capteur incrémental : + 5 V
Sorties:
- 2 fins de courses (max. angle droit/gauche)
- angle TTL (capteur incrémental: 0.018°/incr)
- position (signal vidéo par camera CCD)
Boitier de commande
Boitier 19" (Lxlxh : 471 x 340 x 152 mm, poids 11 kg) contenant un servo-amplificateur, deux alimentations de courant, un module capteur et un module de contrôle.
Alimentation du boitier : 220 V, 50 Hz, 140 W
Servo-amplificateur piloté par PC via un signal analogique.
Alimentations fournissant les courants nécessaires aux différents modules.
Sur la face avant du boitier les affichages correspondants indiquent les tensions disponibles, le statut du système (connexion au contrôleur, système prêt pour expérience), le mode du contrôleur (manuel, PC, externe). Lun des indicateurs possède une clé pour arrêter lensemble des contrôleurs.
Le module capteur fournit un signal analogique -10 ... +10 V et binaire (12 bit parallèle) en fonction du signal vidéo.
les sorties BNC indiquent les mesures de position de la balle, langle du faisceau et le signal du contrôle.
Le module contrôle fournit le signal de commande et darrêt du servo-amplificateur. La zone daffichage intègre deux clés (démarrage manuel ou contrôle extérieur), un potentiomètre (contrôle manuel du signal), un signal dentrée (contrôle extérieur du servo-amplificateur) et un interrupteur pour léclairage.
Disponible sur facade avant:
Entrées
- Commande Manuel du servo moteur via potentiomètre
- Entrée BNC pour signal de commande : -10 ... +10 V
Sorties BNC :
- position de la balle: -10 V ... +10 V
- angle du rail canal A (TTL)
- angle du rail canal B (TTL)
- signal de commande Servo moteur: -10 ... +10 V
Disponible sur facade Arrière :
- Connectique pour controle
Caractéristique Minimal de la carte PC:
- 4 entrées TOR dédiées Comptage incrémental
- 4 Entrées TOR (registre d'état ou 4/12 bits de la position de la balle)
- 1 entrée CAN : analogique 12 bits
ou
- 8 entrées TOR pour lecture de la position avec les 4 autres entrées TOR
- 4 Sorties TOR : sélection registre et sécurité (sortie rapide pulse 10µs)
- 1 sortie DAC : Numérique -10 ... +10 V
Version standard :
BB50 livré avec un boitier de commande 19'' intégrant le servo-amplificateur pour le moteur CC, l'unité d'adaptaion du signal ainsi que les alimentations.
Version PC (en option):
Option BB50-06 : Ecran pour visualiser les images en provenance de la caméra
Poids: 18 Kg